Hi! I am Kaizhen Tan, a Ph.D. student at New York University, supervised by Prof. Chenghe Guan and Prof. Zhan Guo. I received my master’s degree in Artificial Intelligence at Carnegie Mellon University and bachelor’s degree in Information Systems from Tongji University.
My research sits at the intersection of Urban Science and Embodied AI. Driven by the vision of harmonizing artificial intelligence with urban ecosystems, I aim to address the knowledge-to-action gap in digital cities: while urban digital systems are increasingly capable of monitoring conditions, modeling urban dynamics, and anticipating risks, they still struggle to support timely, place-based action. My work seeks to build spatially intelligent and socially aware urban AI systems that make cities more adaptive, inclusive, and governable.
My research integrates:
Paradigms: Robotic Urbanization, Agentic Urban Digital Twins, Multimodal Social Sensing, Spatial Intelligence
Methodologies: Representation Learning, Geospatial & Spatiotemporal Data Analysis, Agent-Based Simulation
Technical Foundations: LLMs, VLMs, AI Agents, World Models
Specifically, my research agenda is organized around four key topics:
🤖 1. Robotic Urbanization & Governance
How can dense cities integrate embodied intelligence while preserving safety, accessibility, and pedestrian experience?
Urban Readiness for Robots: Measure whether sidewalks, crossings, curbs, buildings, and public facilities can support safe robot operation.
Human-Robot Coexistence: Study conflicts, comfort, right-of-way, and interaction norms between robots, pedestrians, cyclists, and vulnerable groups.
Accessibility-Aware Deployment: Design routing and operation strategies that avoid reducing mobility for disabled people, older adults, and children.
Curbside and Low-Altitude Governance: Develop spatial rules for delivery robots and drones, including lanes, parking, corridors, privacy, noise, and safety constraints.
Public Acceptance and Accountability: Model public perception, responsibility boundaries, and governance mechanisms for city-scale deployment.
🏙️ 2. Agentic Urban Digital Twins
How can urban digital twins evolve from static city models into continuously updated systems for sensing, reasoning, and policy support?
Urban Foundation Representations: Fuse remote sensing, street-view imagery, trajectories, POI, IoT, text, and 3D data into unified urban representations.
Continuous Urban Sensing: Use robots, drones, mobile devices, and wearables as emerging data sources to update urban conditions over time.
3D City Understanding: Support geo-localization, semantic mapping, and spatial querying across point clouds, meshes, and 3D Gaussians.
Urban Agents: Build LLM and VLM agents for map reasoning, spatial RAG, policy QA, public service assistance, and planning workflows.
Policy Sandbox: Enable what-if simulation, risk assessment, and implementation checks for urban management and public policy.
🎨 3. Multimodal Social Sensing
How can multimodal human-centered data reveal urban experience, social needs, and governance priorities?
AI-Enhanced Geospatial Analysis: Link urban form, environment, mobility, and public services with human behavior and social outcomes.
Pedestrian Experience and Accessibility: Detect walking barriers, sidewalk quality, perceived safety, and mobility challenges in everyday urban environments.
Urban Perception and Visual Aesthetics: Quantify streetscape quality, neighborhood imagery, and place identity to support design and regeneration decisions.
Socio-Cultural Signals: Extract place-based narratives from text, images, and online platforms to understand local identity and public concerns.
Participatory Governance: Translate social sensing results into explainable tools for planners, communities, and decision-makers.
🚀 4. Spatial Intelligence & World Models
How can spatial intelligence provide reliable reasoning, memory, and simulation capabilities for urban AI systems?
Embodied Spatial Representations: Unify geometry, semantics, physics, affordance, and action for robots, agents, and urban digital twins.
Urban World Models: Learn predictive models of how urban spaces change and how agents interact with physical and social environments.
Spatial Reasoning with VLMs: Improve map understanding, 3D reasoning, scene interpretation, and location-aware decision-making.
Lifelong Updating and Memory: Develop mechanisms for continuous learning, forgetting control, uncertainty tracking, and safe model updates.
Interpretable and Robust Decision Support: Make spatial AI systems transparent enough for planning, governance, and real-world deployment.
🔥 News
2026.07: 🎉 Our paper CREG was accepted by the 9th Chinese Conference on Pattern Recognition and Computer Vision (PRCV 2026).
2026.03: 🎓 I am pleased to share that I will begin my PhD at New York University in Fall 2026 under the supervision of Prof. Chenghe Guan and Prof. Zhan Guo.
2026.01: 🎉 The abstract co-authored with Prof. Fan Zhang has been accepted for the XXV ISPRS Congress 2026. See you in Toronto!
2025.12: 🎉 Our paper, led by my senior labmate Dr. Weihua Huan and co-authored with Prof. Wei Huang at Tongji University, was accepted by GIScience & Remote Sensing; honored to contribute as second author and big congratulations to Dr. Huan!
2025.10: 🔭 Joined Prof. Yu Liu and Prof. Fan Zhang’s team at Peking University as a remote research assistant.
2025.08: 🎉 Delivered an oral presentation at Hong Kong Polytechnic University after our paper was accepted to the Global Smart Cities Summit cum The 4th International Conference on Urban Informatics (GSCS & ICUI 2025).
2024.04: 🔭 Began my academic journey at Prof. Wei Huang’s lab in the College of Surveying and Geo-Informatics, Tongji University.
📖 Education
New York University2026.09 – 2031.05
Ph.D. student in Urban Science · New York / Shanghai
Designing embodied-intelligence-friendly urban spaces, and advancing collaborative governance through digital twins and urban agents that model complex city dynamics.
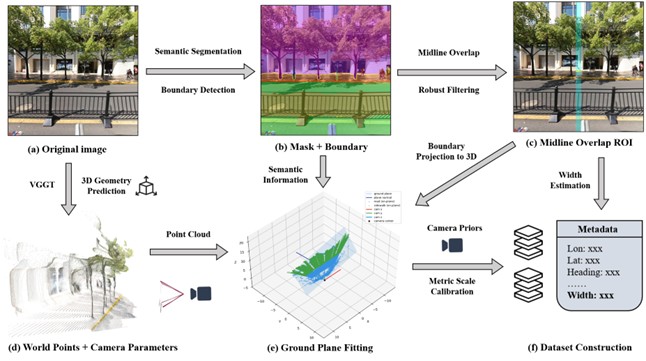
Automated urban element measurement from street view using VGGT and semantic segmentation, recovering metric scale via ground-plane fitting and camera-height calibration for large-scale data generation.
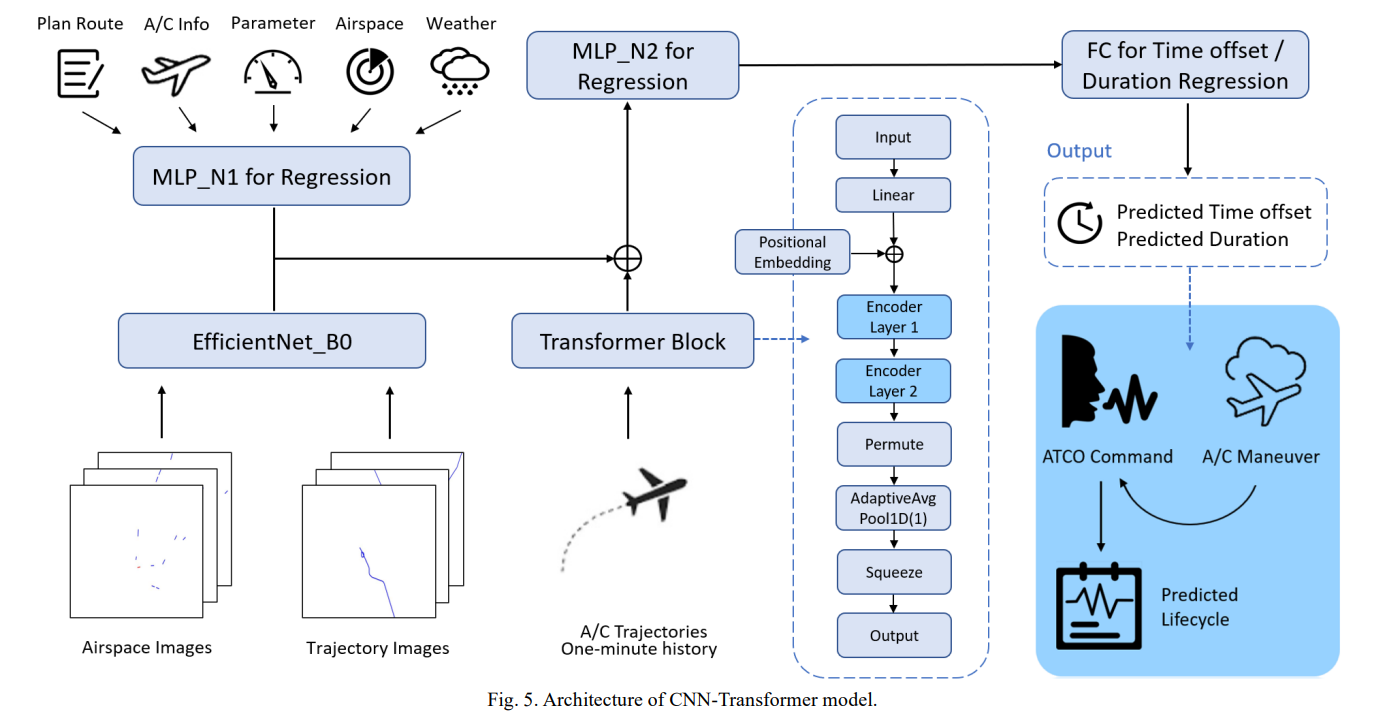
Modeled air traffic controller communication tasks to predict workload from radiotelephony and trajectory data, integrating multi-source air traffic data with a CNN-Transformer model.
Built a multimodal pipeline over social media reviews and photos to analyze tourist perception of historic quarters, fine-tuning segmentation models and applying sentiment analysis for multi-dimension satisfaction scores.
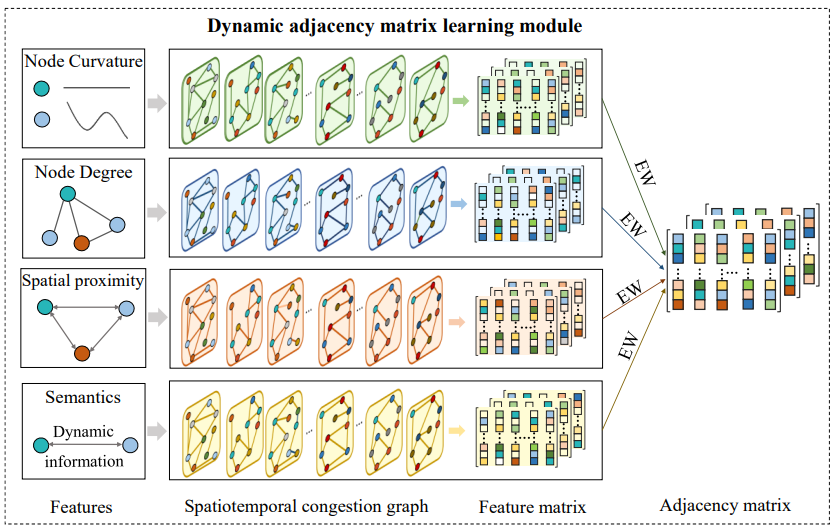
Modeled traffic congestion propagation with spatiotemporal graphs and multi-scale community search, linking propagation patterns to built environment factors via causal analysis and POI-based features.
Ran end-to-end market and competitive analysis for AI products (Migo, Auto-Research) against 50+ vertical tools, built an operational KPI dashboard for retention and behavior funnels, and established evaluation frameworks for Migo's InternLM model.
A measurement pipeline that estimates metrically scaled sidewalk width from a single street-view image through VGGT-based 3D reconstruction, semantic segmentation, and adaptive ground-plane fitting, reaching 0.25 m MAE on a Washington D.C. benchmark.
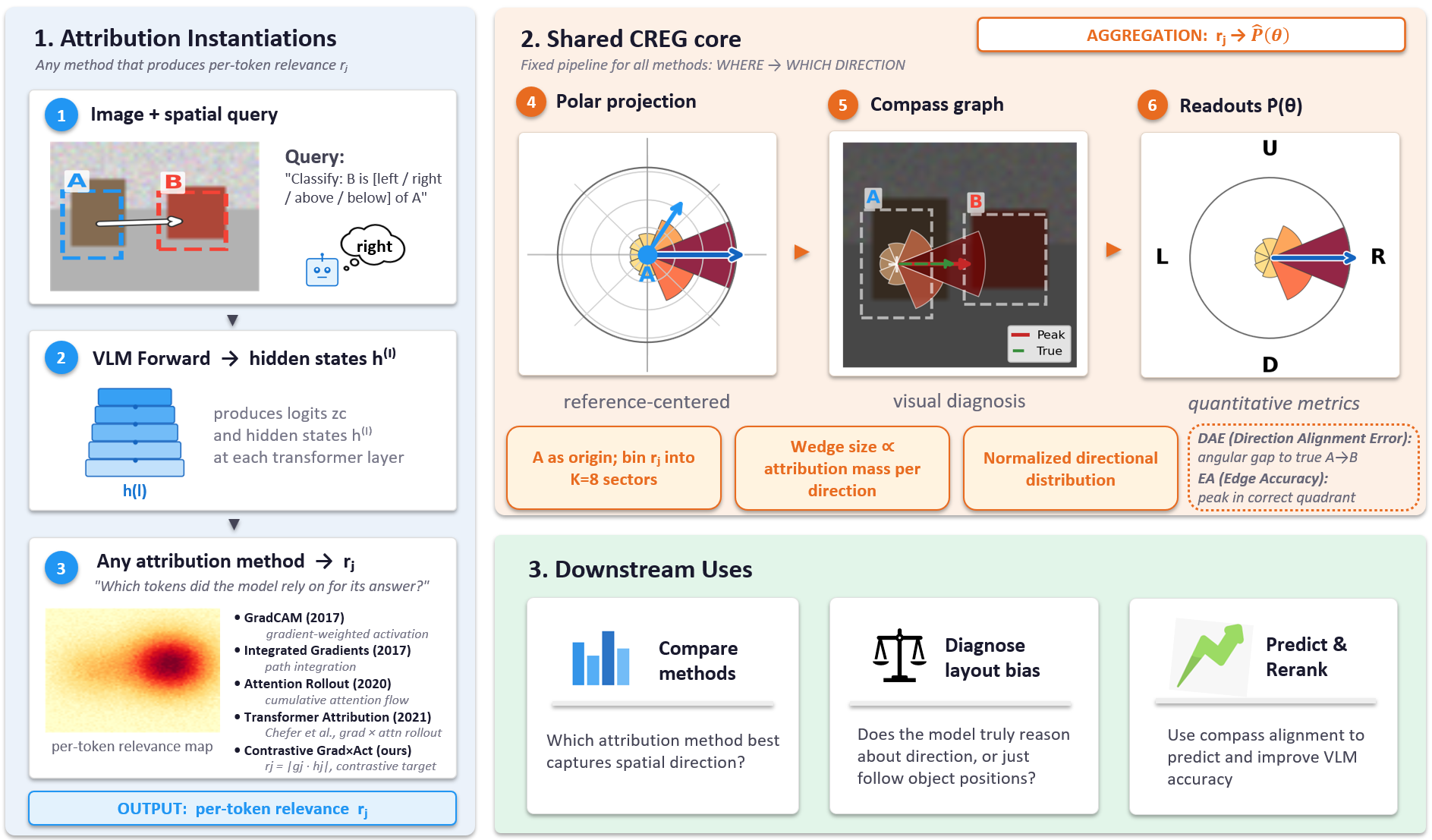
CREG: Compass Relational Evidence Graph for Characterizing Directional Structure in VLM Spatial-Reasoning Attribution
A training-free diagnostic that maps vision-language model attributions onto a compass graph, measuring whether the evidence a model attends to aligns with the queried spatial direction. Higher accuracy does not imply better directional structure.
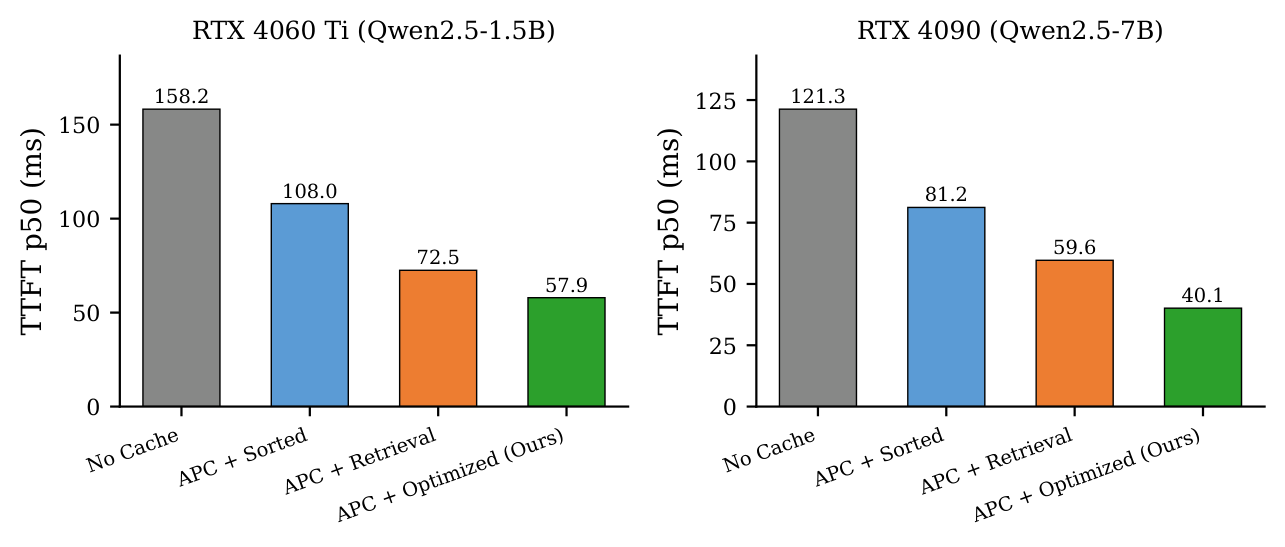
CacheWeaver: Cache-Aware Evidence Ordering for Efficient Grounded RAG Inference
A prompt-layer reordering method that rearranges retrieved evidence so overlapping passages share prefix-cache hits, cutting median time-to-first-token by 20–33% across three vLLM configurations without touching the serving engine or the evidence set.
A Spatiotemporal Adaptive Local Search Method for Tracking Congestion Propagation in Dynamic Networks
A spatiotemporal adaptive local search (STALS) method combining dynamic graph learning and spatial analytics to trace how large-scale urban traffic congestion propagates through a road network.
Decoding Tourist Perception in Historic Urban Quarters with Multimodal Social Media Data: An AI-Based Framework and Evidence from Shanghai
Kaizhen Tan, Yufan Wu, Yuxuan Liu, Haoran Zeng
Global Smart Cities Summit cum The 4th International Conference on Urban Informatics (GSCS & ICUI), 2025.
A multimodal framework for reading tourist perception in historic Shanghai quarters, combining image segmentation, color theme analysis, and sentiment mining into four-dimensional satisfaction scores.
Multimodal Deep Learning for ATCO Command Lifecycle Modeling and Workload Prediction
Kaizhen Tan
7th Asia Conference on Machine Learning and Computing, 2025.
A CNN-Transformer framework linking air traffic controller voice commands to aircraft trajectories, modeling command lifecycle and workload dynamics to support command generation and scheduling in terminal airspace.
Preprints & Under Review
GeoFidelity-Bench: Evaluating Segment-Level Geographic Fidelity in Text-to-Image Street-View Generation
A benchmark of 7,117 curated Mapillary images over 109 named road segments in 25 cities, asking whether text-to-image models render this street or merely a plausible one. Street and neighborhood names help; GPS coordinates alone do not.
What Can Latent World Models Know? Physical Parameter Identifiability in Multimodal Predictive Representations
Kaizhen Tan, Xin Xu, Siru Tao, Yixiao Li, Hanzhe Hong, Yang Feng, Heqing Du
Asks which physical parameters a latent world model actually recovers in its predictive representation, and which stay structurally unidentifiable however well the model predicts.
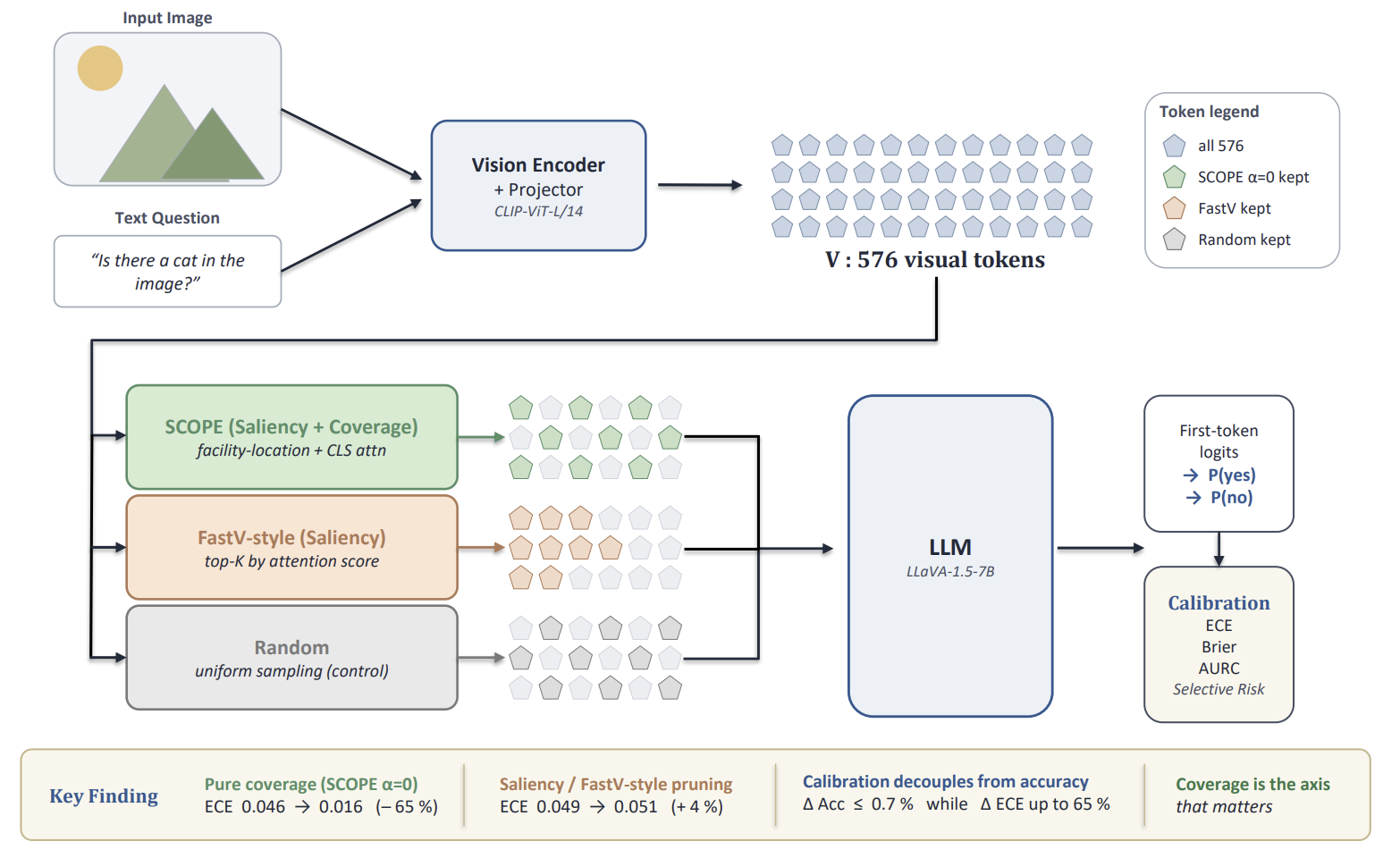
When Does Visual Token Pruning Improve Calibration? The Role of Evidence Coverage in MLLMs
Kaizhen Tan, Yang Feng, Heqing Du, Hanzhe Hong, Siru Tao, Xin Xu
For multimodal LLM confidence, the selection rule matters more than the token budget: coverage-based pruning cuts expected calibration error on POPE with LLaVA-1.5 while holding accuracy, and the kept-set coverage tracks accuracy but not confidence.
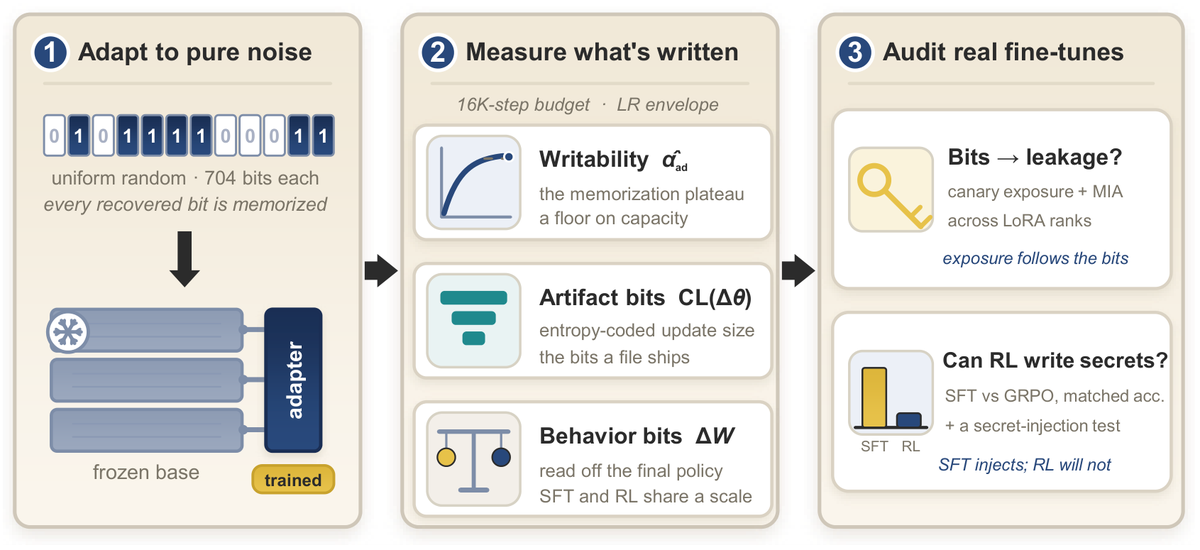
How Many Bits Can an Adapter Write? Measuring the Capacity and Memorization of Parameter-Efficient Fine-Tuning
Measures in bits what a LoRA adapter can actually store: roughly two bits per trainable parameter, governed more by where the parameters sit than how many there are. On Qwen2.5, supervised fine-tuning memorizes verbatim while RL with verifiable rewards does not.
In Preparation
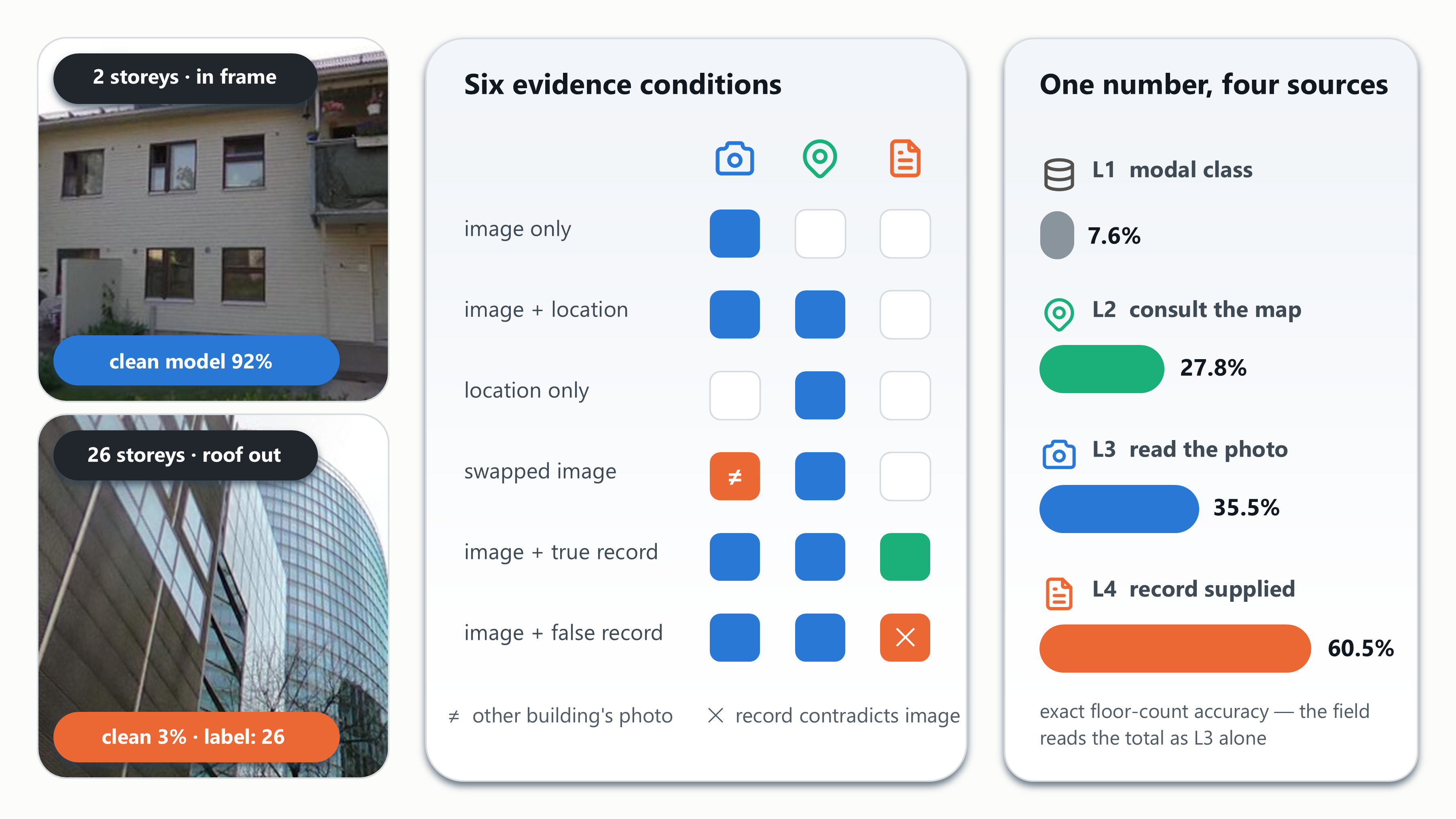
What Photographs Add: Information Accounting for Street-Level Building Attribute Prediction
Kaizhen Tan, et al.
Manuscript in preparation.
An information-accounting audit that separates building-attribute accuracy into the global base rate, spatial prior, photograph, and supplied metadata. It finds that imagery adds the most where maps are sparse and can be eclipsed by location or annotation leakage.
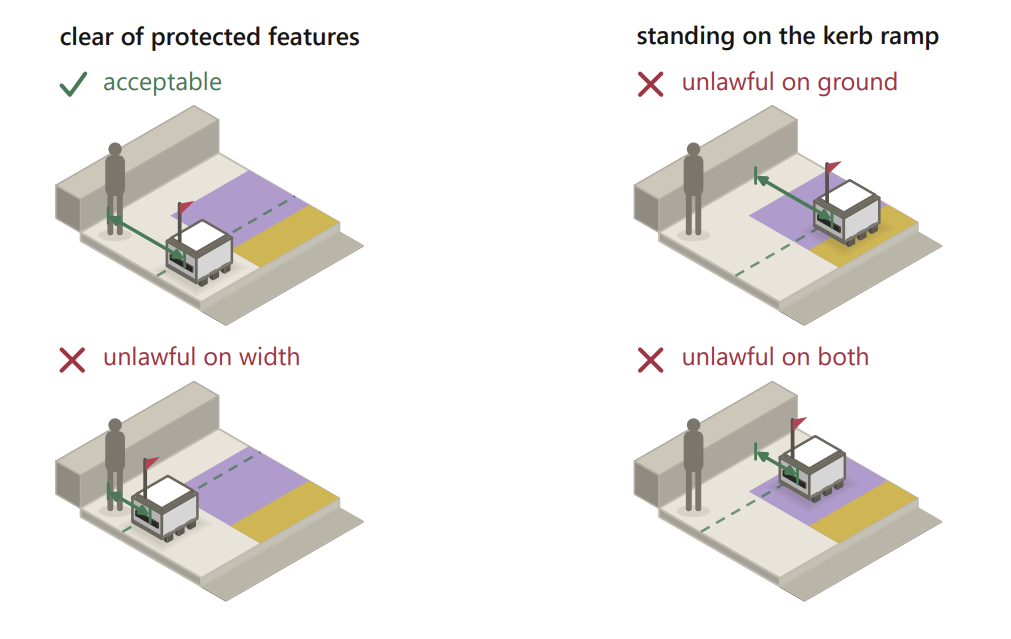
There Is No Shoulder: Accessibility-Constrained Failure Siting for Sidewalk Delivery Robots
Kaizhen Tan, et al.
Manuscript in preparation.
Reframes sidewalk delivery-robot failure as a siting problem: the stopped robot must preserve accessible clear width and avoid kerb ramps and tactile paving. City-scale analyses show why safe failure depends on operating geography and retrieval time, not only the fallback controller.
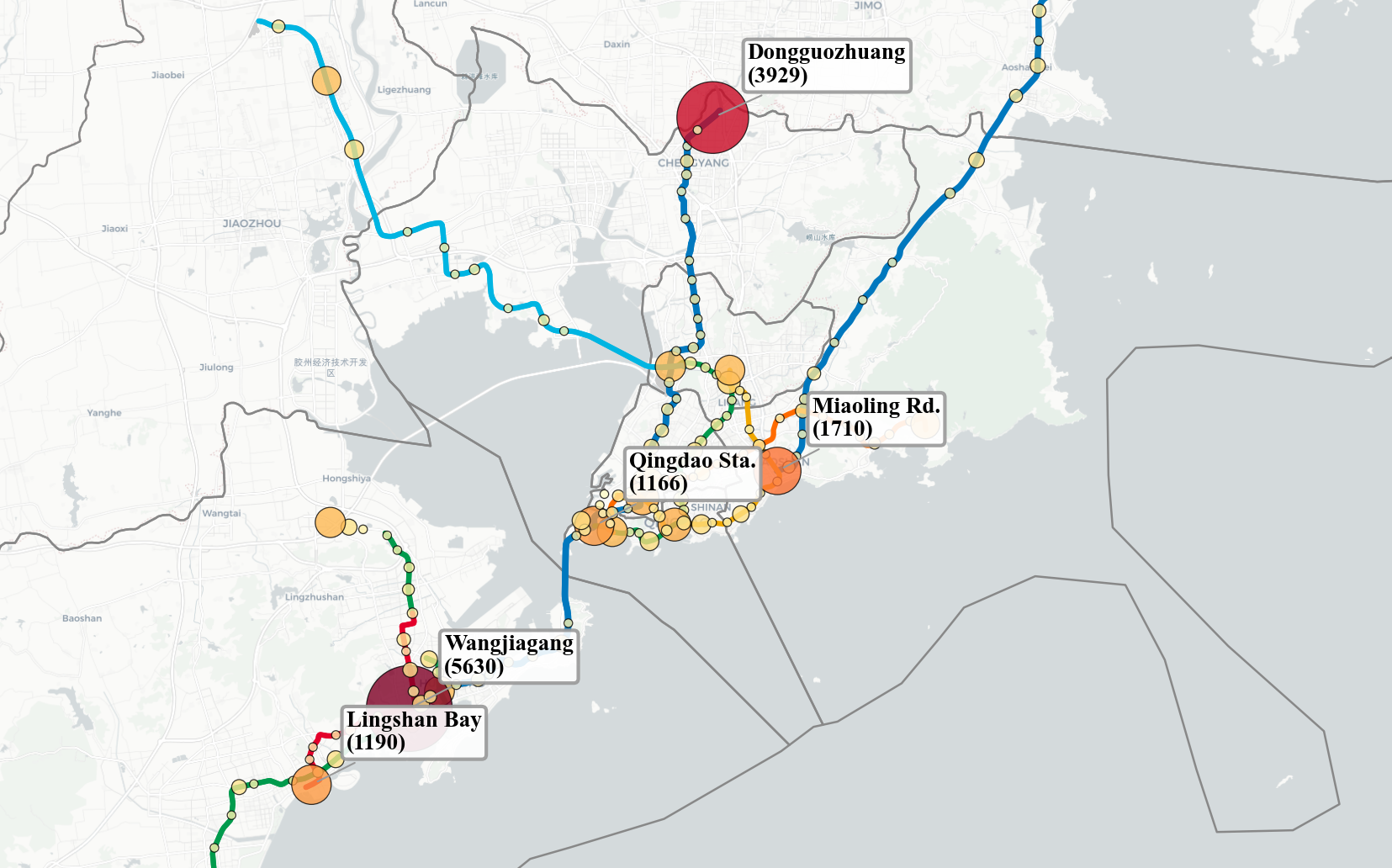
What We Lose, What We Gain: Spatio-temporal Patterns of Lost-and-Found Items in Qingdao Metro
Kaizhen Tan, et al.
Manuscript in preparation.
34,333 lost-and-found records across 173 metro stations, read for spatio-temporal loss patterns, holiday effects, and station-level hotspots that transit operators can act on.
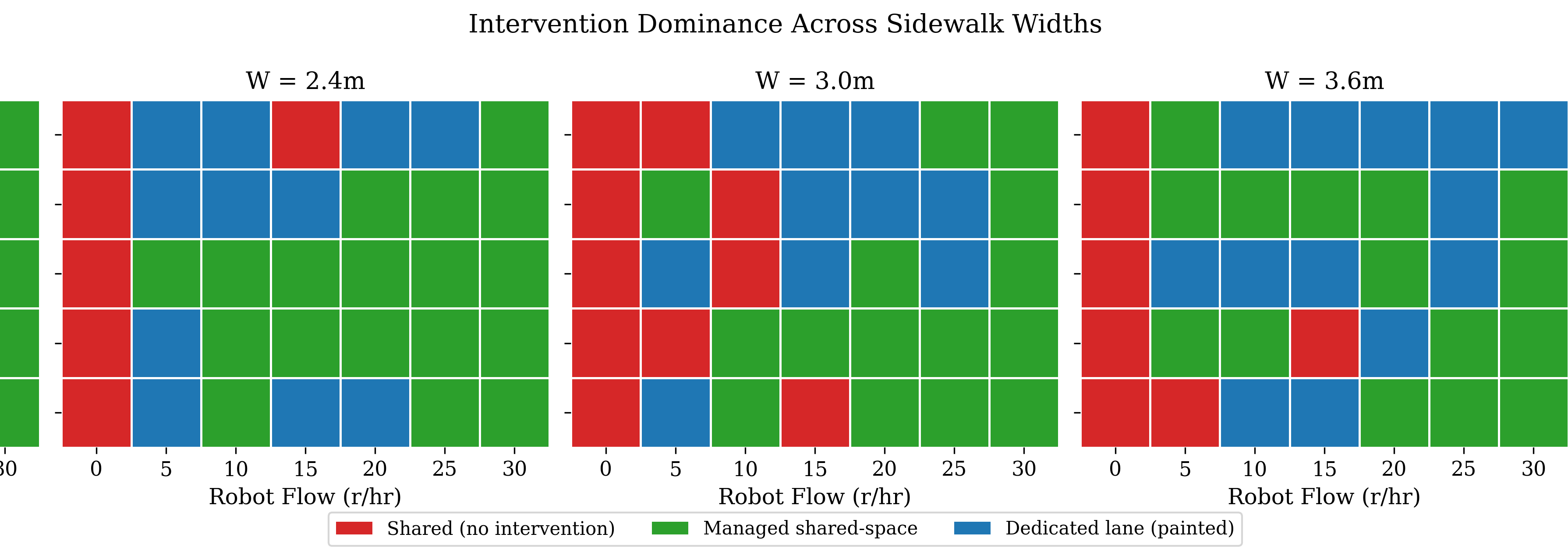
RoboROW: Simulating and Governing Right-of-Way for Urban Service Robots in Shared Urban Spaces
Kaizhen Tan, et al.
Manuscript in preparation.
When should a city give sidewalk robots their own lane? An agent-based simulation that screens shared versus dedicated right-of-way policies against pedestrian delay, comfort, and accessibility.
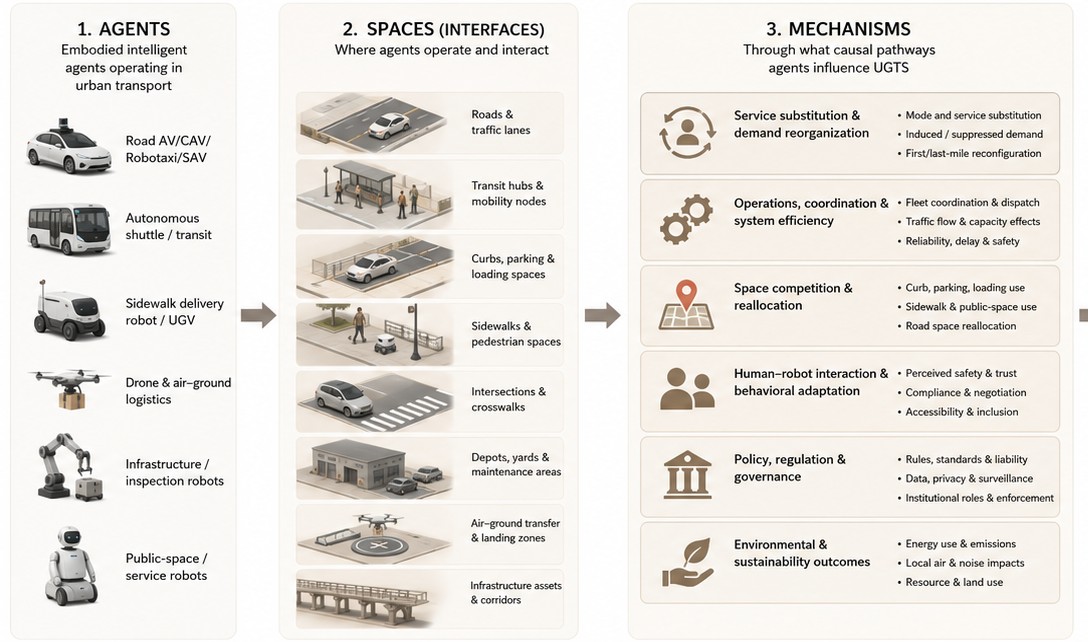
Robotic Urbanization and the Transformation of Ground Transportation Systems: Impacts, Challenges, and Opportunities
Kaizhen Tan, et al.
Manuscript in preparation.
A synthesis of how embodied machines entering streets, sidewalks, and curbs reshape ground transportation, and what that demands of infrastructure design, regulation, and accountability.
Technical Reports
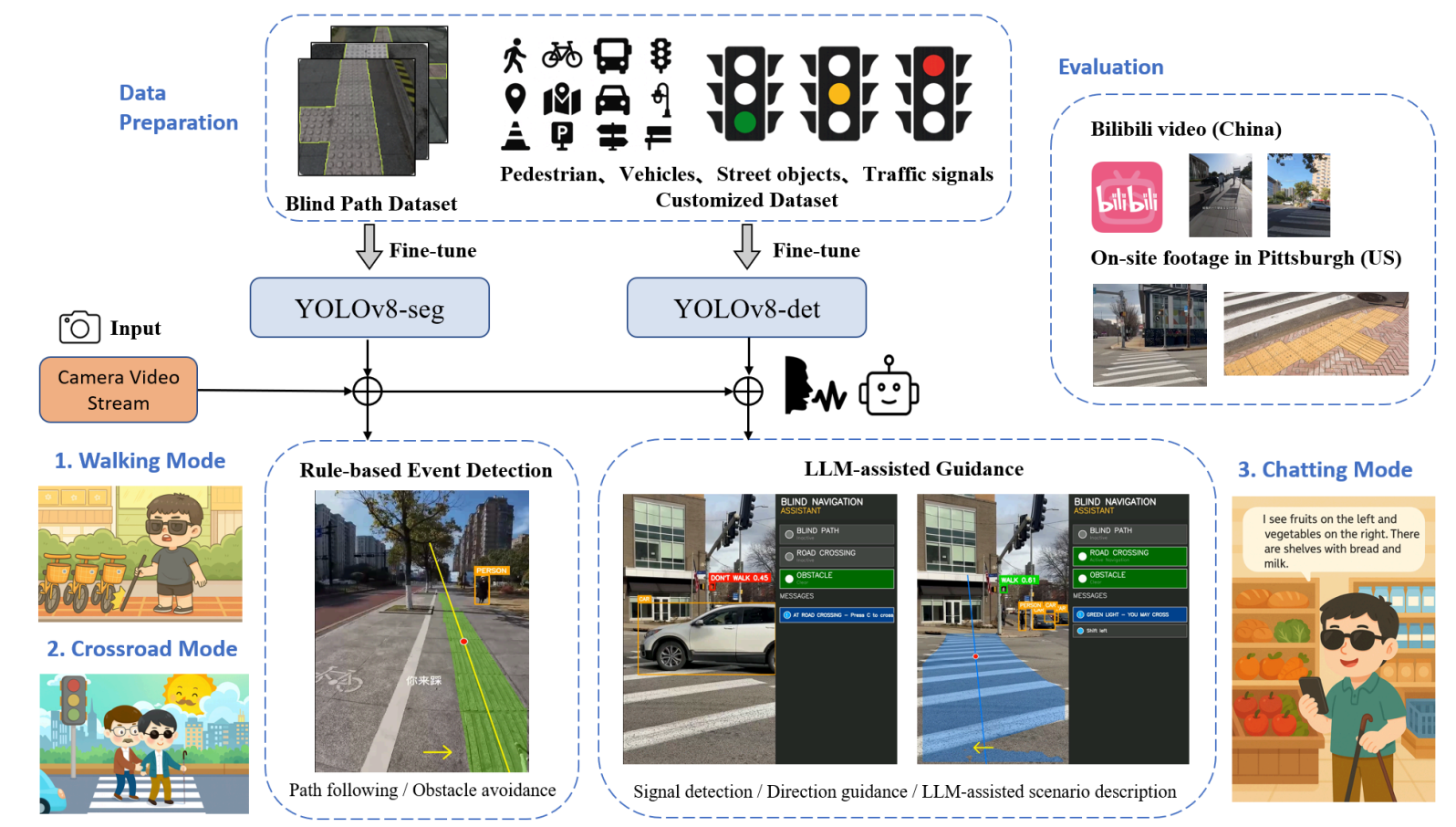
BlindNav: YOLO+LLM for Real-Time Navigation Assistance for Blind Users
BlindNav is a real-time, camera-based navigation assistant that uses YOLO for street-scene detection and a local LLM to turn those signals into concise voice guidance for blind and low-vision pedestrians.
No publications in this direction yet.
💬 Presentations
2026.07 - XXV ISPRS Congress 2026
UrbanVGGT: Scalable Sidewalk Width Estimation from Street View Images Toronto, Canada
2025.08 - Global Smart Cities Summit cum The 4th International Conference on Urban Informatics (GSCS & ICUI 2025)
Decoding Tourist Perception in Historic Urban Quarters with Multimodal Social Media Data: An AI-Based Framework and Evidence from Shanghai Hong Kong Polytechnic University (PolyU), Hong Kong SAR, China
2025.07 - 7th Asia Conference on Machine Learning and Computing (ACMLC 2025)
Multimodal Deep Learning for ATCO Command Lifecycle Modeling and Workload Prediction Hong Kong SAR, China
📫 Contact
Email(NYU): kt3275@nyu.edu
Email(CMU): kaizhent@cmu.edu
Please feel free to reach out if any of these research directions resonate with you. I'd be happy to chat!
 Xiaohongshu
Xiaohongshu ORCID
ORCID{kind=link}